STM32的CAN總線中繼器設計及應用
CAN(Controller Area Network)總線因其高可靠性、實時性和多主特性,廣泛應用于汽車電子、工業自動化等領域。受限于物理層特性,CAN總線的通信距離和節點數量存在上限。為了擴展網絡規模、延長通信距離或隔離不同網段,CAN總線中繼器成為一種關鍵設備。本文將探討基于STM32微控制器的CAN總線中繼器的設計原理及其應用場景。
一、CAN總線中繼器的基本原理
CAN總線中繼器,本質上是一個具有兩個獨立CAN接口的智能網關設備。它的核心功能是監聽并轉發CAN報文。其基本工作原理如下:
- 監聽與接收:中繼器的CAN接口1實時監聽其所在網段A的所有CAN報文。
- 過濾與處理:微控制器(如STM32)的CAN控制器接收這些報文,并根據預設規則(如報文ID過濾)決定是否進行處理。
- 轉發與發送:對于需要轉發的報文,微控制器通過其CAN接口2,按照標準CAN協議將報文發送到網段B。
- 雙向透明傳輸:一個完整的中繼器通常具備雙向轉發能力,即在兩個網段之間建立透明的雙向通信通道,實現網段A與網段B的隔離與橋接。
二、基于STM32的中繼器硬件設計
STM32系列微控制器,尤其是內置了雙CAN控制器(如STM32F103xC/D/E、STM32F407/417等)的型號,是實現CAN中繼器的理想選擇。硬件設計主要包括:
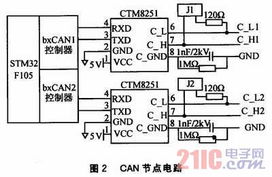
- 核心控制器:選用具有雙CAN外設的STM32芯片,如STM32F105/107或STM32F4系列。這允許芯片直接管理兩個獨立的CAN通道,無需外部擴展,簡化了設計。
- CAN收發器電路:每個CAN接口都需要一個獨立的CAN收發器(如TJA1050、SN65HVD230等),負責將控制器的邏輯電平轉換為符合ISO 11898標準的差分信號。兩個收發器在物理上和電源上應做好隔離,以提高抗干擾能力和網絡安全性。
- 隔離設計:為增強可靠性,可在STM32的CAN控制器與收發器之間加入數字隔離器(如ADuM1201)和隔離電源模塊,實現兩個CAN網段間的電氣隔離,有效抑制地環路干擾和電勢差帶來的影響。
- 電源與外圍電路:提供穩定的電源,并設計復位、調試(SWD/JTAG)和狀態指示(LED)等基本電路。
三、基于STM32的中繼器軟件設計
軟件是賦予中繼器“智能”的關鍵,主要流程在STM32的固件程序中實現:
- CAN外設初始化:分別初始化兩個CAN控制器,設置相同的或適應各自網段的波特率、工作模式(通常為正常模式)和過濾器配置。
- 報文接收中斷服務:為兩個CAN接口分別使能接收中斷。當任一接口收到有效報文時,進入中斷服務程序。
- 報文處理與轉發:在中斷服務程序中,讀取接收到的報文(ID、DLC、數據等),并立即或經過簡單的過濾/映射后,通過另一個CAN控制器的發送郵箱將其發送出去。為確保實時性,此過程應高效簡潔。
- 高級功能實現:
- ID過濾/映射:可以只轉發特定ID范圍的報文,或對轉發的報文ID進行偏移,避免兩個網段ID沖突。
- 波特率轉換:兩個CAN接口可以設置不同的波特率,實現不同速率網段間的橋接。
- 錯誤管理與狀態監測:監控CAN總線錯誤,并通過LED或通信接口上報中繼器自身狀態。
四、應用場景
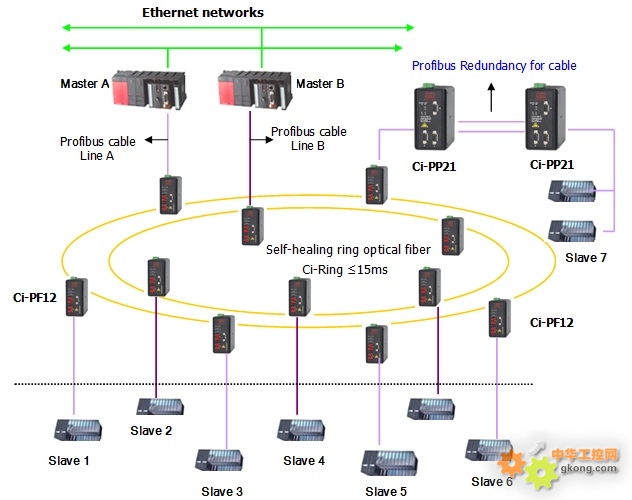
- 延長通信距離:當CAN總線長度超過其波特率所允許的最大距離時,可在中間加入中繼器,將長距離鏈路分割為多個符合規范的短段,從而突破距離限制。
- 增加節點數量:每個CAN網段的節點負載能力有限。通過中繼器可以連接更多網段,從而接入遠超單網段限制的節點總數。
- 網絡分段與隔離:在復雜的工業系統中,將不同功能子系統(如動力系統、控制系統、儀表系統)放置在不同的CAN網段,通過中繼器連接。這可以提高網絡可靠性,某一網段的故障或 heavy load 不易擴散到其他網段。
- 不同波特率網絡互聯:橋接通信速率不同的CAN網絡,例如連接一個500kbps的快速控制網絡和一個125kbps的慢速設備網絡。
- 作為故障診斷接口:中繼器可以設計第三個接口(如USART或USB)連接到上位機,在不干擾主網絡通信的情況下,實現對任一網段數據的監聽與分析。
五、
基于STM32設計CAN總線中繼器,充分利用了其高性能、雙CAN外設集成和豐富生態的優勢,實現了硬件結構緊湊、軟件靈活可控的方案。這種中繼器不僅解決了CAN總線物理擴展的基本問題,還能通過軟件實現智能過濾、速率轉換等高級網絡管理功能,是構建復雜、可靠、大規模CAN網絡系統的有效工具。在具體的車載網絡升級、工業生產線擴展等項目中,具有很高的實用價值。
如若轉載,請注明出處:http://www.denmat.cn/product/27.html
更新時間:2026-06-19 04:17:37